Launcher
DISCLAIMER: Much of this is out of date following removal of CTI and MRNet. Refer to Multi Node Deployment for most accurate info
The Launcher is responsible for communicating from the user to Global Services and Local Services. The Launcher supports Single Node Deployment as well as Multi Node Deployment.
Single Node Deployment and Multi Node Deployment, have different requirements for launching applications. In both cases there is a Launcher frontend and a Launcher backend`. In the multi-node case additional components come into play to set up the communication between the frontend and backend. The Launcher can be run in Launcher Server Mode to support user-defined interaction between the login node and compute nodes.
FIXME: Some more detail on the requirements for multi-node and single-node would be good here
Launcher Single Node Architecture

Fig. 49 Single node architecture of the Launcher component

Fig. 50 Single-node Launcher/Backend Components
In a single node deployment of Dragon, the launcher consists of the following components:
Launcher Frontend: User input and output.
- Launcher Backend:
Startup of and communication with Local Services using standard POSIX pipes.
Communication with all Dragon Services via Infrastructure Messages through Channels.
In the single-node case, the Launcher frontend starts the Launcher Backend which then in turn starts the Local Services. The Launcher Front End communicates with the Launcher Back End via its stdin and stdout streams. The Launcher Back End communicates with the Shepherd via its stdin and stout during startup and teardown. After startup and before teardown all communication between the Launcher Back End, the Shepherd, and Global Services occurs over Channels. See Single Node Bringup and Single Node Teardown for details on the process.
Launcher Multi Node Architecture

Fig. 51 Multi node architecture of the Launcher component

Fig. 52 Multi-node Launcher/Backend Components
In the multi-node case, shown in Fig. 51 and Fig. 52, the Launcher Front End uses the workload manager to start the Shepherd on every node through CTI. It then starts the Network Front End which creates an MRNet Server Front End which creates a scalable communication tree that eventually connects to a Network Back End. The Launcher Back End component is started by MRNet and communication between the Launcher Back End and the Shepherd is accomplished via a pair of Posix message queues during startup and teardown. After startup and before teardown all communication between the Backend, the Shepherd, and Global Services occurs over channels.
The Launcher Back End starts the Network Back End during startup. The Network Back End the creates a MRNetServer Back end which attaches to the MRNet network. Both the Launcher Front End and the Launcher Back End communicate with their corresponding Network Front End and Back End components via stdin and stdout of their respective processes.
Internally, the Launcher Front End is composed of a server that routes messages to and from the user. The user interacts with the Command Processor which is a Read Evaluate Print Loop for Python. The command processor is a full-fledged Python interpreter with several predefined functions for invoking the various Launcher commands. The command definitions are given in the LauncherCommands section.
Not depicted in Fig. 52, the Global Services and its Channels are only present on the primary node. All other components on the compute node are present on every compute node.
Launcher Components
During initialization the Launcher Front End creates the Network Front End as a process. The Network Front End creates an instance of the MRNetServerFE object and provides it a callback that is invoked when data comes from the MRNet Server to the Network Front End. The callback handler writes the message to stdout, which the Launcher Front End can then read. The Launch Front End writes to stdin of the Network Front End to send data across the MRNet Network to compute nodes. If the Network Front End receives an LABroadcast message, it calls the broadcast method of the MRNet Server Front End.
The Launcher Backend is an AsyncIO process and monitors its stdout of the Network Back End (via an AsyncIO task) and reads from the Network Back End pipe and to receive data coming from the front end. The Network Back End provides a callback handler the the MRNetServerBE object to be called when data flows from the front end. This callback handler writes any data to the stdout of the Network Backend which then gets read by the Launcher Back End’s AsyncIO monitor task.
As mentioned, the Network Front End is a process and is started by the Launcher Front End. The Network Backend is also a process and is started by MRNet as part of the bringup of an HPC job allocation under the control of slurm. The Shepherd is brought up by CTI during startup.
In the case of single-node Dragon run-time services, the Launcher Front End is started by the user and the Launcher Front End starts the Launcher Back End which in turn starts the Shepherd. All startup/teardown communication between the components occurs on these stdin and stdout streams resulting from these process creations.
In both multi-node and single-node mode, the Launcher Back End does not run as a managed process to be consistent between the multi-node and single-node cases.
Any LABroadcast message ends up in the Launcher Back End which then unwraps the broadcasted message and forwards it to the appropriate component, which as of this writing is always the Shepherd. Currently there are two broadcasted messages, the SHHaltTA message and the SHTearDown message.
FIXME: We could introduce separate frontend and backend descriptions here. They are references at a lot of places.
The Launcher’s Network Components
The Network front and back end program components of the launcher are responible for communicating with their respctive Launcher front end and back end components. The code for both the network front end and back end components of the are relatively simple applications employing the two classes MRNetServerFE and MRNetServerBE. The network front end and back end programs create an instance of their respective class and then read from standard input and send any standard input on to the other side. Both components write any received messages from the other side (via their callback handler) to standard output. The two programs are provided below for reference.
NOTE: The Launcher’s Network Front End has an external dependency on the _tc field of the LABroadcast message being set to 68.
Network Front End
#include <dragon/mrnetserverfe.hpp>
#include <cstdlib>
#include <unistd.h>
#include <fstream>
void mrnet_callback(MRNetServerFE* server, const std::string& msg) {
std::cout << msg << std::endl << std::flush;
}
bool file_exists(const char *fileName)
{
std::ifstream infile(fileName);
return infile.good();
}
// The argv arguments are passed to the MRNet backend program as
// command-line arguments.
int main(int argc, char *argv[])
{
try {
std::vector<const char*> cti_args;
char* cti_ptr = std::getenv("DRAGON_CTI_EXEC");
if (cti_ptr == NULL) {
std::cerr << "DRAGON_CTI_EXEC value not found in environment." << std::endl;
return -1;
}
std::string cti_exec = cti_ptr;
cti_args.push_back(cti_exec.c_str());
std::vector<const char*> mrnetbe_args;
char* mrnet_ptr = std::getenv("DRAGON_MRNETBE_EXEC");
if (mrnet_ptr == NULL) {
std::cerr << "DRAGON_MRNETBE_EXEC value not found in environment." << std::endl;
return -1;
}
std::string mrnetbe_exec = mrnet_ptr;
mrnetbe_args.push_back(mrnetbe_exec.c_str());
// argv[0] is this executable which is not needed by the backend.
// argv[1] is the dragon_mode set to 'hsta'.
// argv[2] is the extra manifest file required for the backend executable. This is the
// path to the launchernetbe executable which is started via a Popen by the
// DRAGON_MRNETBE_EXEC program.
// Starting at argv[2] are any arguments needed by the backend executable
// specified by the DRAGON_MRNETBE_EXEC environment variable.
std::vector<const char*> additionalManifestFiles;
for (int k=1;k<argc;k++) {
mrnetbe_args.push_back(argv[k]);
if (file_exists(argv[k])) {
additionalManifestFiles.push_back(argv[k]);
}
}
MRNetServerFE server(cti_args, mrnetbe_args, &mrnet_callback, environ, additionalManifestFiles);
// The first thing written to stdout is the number of nodes in the allocation.
std::cout << server.get_num_nodes() << std::endl << std::flush;
std::string msg;
// A Broadcast message will contain "_tc": 68 in it since this is the typecode
// for a LABroadcast message.
std::string bcast = "\"_tc\": 68";
while (std::getline(std::cin, msg)) {
if (msg.find(bcast) != std::string::npos)
server.send_all(msg);
else
server.send_primary(msg);
}
server.shutdown();
} catch (const std::exception &exc) {
// catch anything thrown within try block that derives from std::exception
std::cerr << exc.what();
}
}
Network Back End
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <dragon/mrnetserverbe.hpp>
void mrnet_callback(MRNetServerBE* server, const std::string& msg) {
// Anything coming down the MRNet tree is written
// to standard output for the piped parent process to read.
std::cout << msg << std::endl << std::flush;
}
int main(int argc, char *argv[])
{
MRNetServerBE server(argc, argv, &mrnet_callback);
// After attaching to the MRNet the first thing is to
// provide the node index to the backend launcher.
std::cout << server.get_node_id() << std::endl << std::flush;
std::string msg;
// Anything coming from the parent process through
// stdin is sent up to through the MRNet tree.
while (std::getline(std::cin, msg)) {
server.send(msg);
}
server.shutdown();
}
MRNet
The MRNet is an open source API for constructing a tree communication structure between nodes in a distributed system. The MRNet API comes out of the University of Wisconsin, Madison. The MRNet is used to start the shepherd on each node which in turn brings up other parts of the service.
See the MRNet page for further details.
Starting the Launcher
In the multi-node version of Dragon, the Launcher is started by a wrapper program that manages the allocation of a number of nodes via an salloc command. The SLURM workload manager provides this salloc command for starting the Launcher. When a different workload manager is used, then a different wrapper may be necessary. This wrapper accepts any parameters as specified in the section on Invoking the Launcher.
The Launcher wrapper requires one extra parameter, the argument -cores specifies how many cores that Dragon is to be allocated on. The launcher then determines from the current partition the minimum number of nodes that will be required to satisfy that request. Then this value is passed on to the salloc command to acquire and allocation that satisfies the user’s request and runs one instance of the Shepherd per node so each is included in the set of Dragon run-time service nodes.
This Launcher wrapper sets required environment variables including the number of nodes for the allocation and the DRAGON_MODE environment variable that indicates that dragon is running in muitinode mode. The wrapper then executes the salloc command with the actual start of the launcher within it and any launcher specific arguments passed into it.
Launcher Messages
Launcher specific message definitions can be found within the Launcher Messages API. Definitions for other messages can be found within the Infrastructure Messages section. Links to specific messages are provided within this documentation as they appear.
Starting the Launcher
In the multi-node version of Dragon, the Launcher is started by a wrapper program that manages the allocation of a number of nodes via an salloc command. The SLURM workload manager provides this salloc command for starting the Launcher. When a different workload manager is used, then a different wrapper may be necessary. This wrapper accepts any parameters as specified in the section on Invoking the Launcher.
The Launcher wrapper requires one extra parameter, the argument -cores specifies how many cores that Dragon is to be allocated on. The launcher then determines from the current partition the minimum number of nodes that will be required to satisfy that request. Then this value is passed on to the salloc command to acquire and allocation that satisfies the user’s request and runs one instance of the Shepherd per node so each is included in the set of Dragon run-time service nodes.
This Launcher wrapper sets required environment variables including the number of nodes for the allocation and the DRAGON_MODE environment variable that indicates that dragon is running in multinode mode. The wrapper then executes the salloc command with the actual start of the launcher within it and any launcher specific arguments passed into it.
Launcher Server Mode
This section provides details of running the Dragon Launcher in Server Mode. This mode can be used to support any user-defined interaction between the login node and compute nodes running under the Dragon run-time services. Server mode may be necessary for some multi-node applications but can be used in single-node as well allowing a server application to run in either environment.

Fig. 53 Dragon Server Mode
In server mode there are two programs that are started by the launcher. The Server Front End and the Server Back End. The front end runs on the login node. The back end runs on the primary compute node. When the server front end is started, it is started so that standard input and output are pipes. On the back end the program is started and has access to the complete Dragon run-time services.
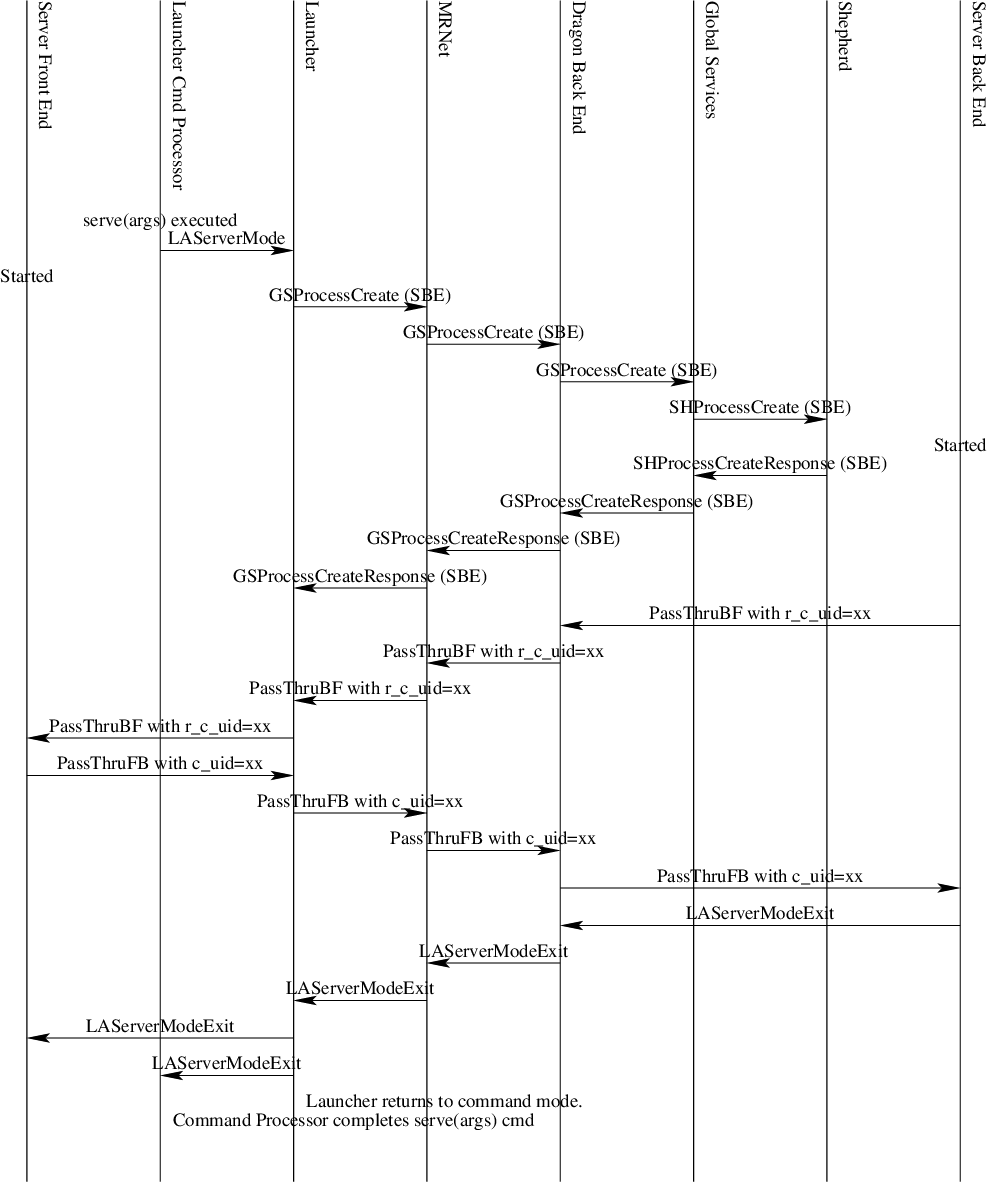
Fig. 54 PassThru Message Exchange
The Launcher starts the front end specifying that standard input and output are to be piped from/to the launcher.
The Server Back End initiates contact with the Server Front End by sending a LAPassThruBF message. Initiating the conversation by first sending this message guarantees that the backend will be ready to accept messages on its channel. The Server Back End creates a channel for receiving messages from the Server Front End and provides the channel id in this initial LAPassThruBF message as the r_c_uid field. After receiving this initial message, Server Front End can then send LAPassThruFB messages to the Server Back End using this channel id.
From the perspective of the implementer of both the Server Front End and the Server Back End the exact mechanics of sending and receiving these passthru messages can be managed by a few of API calls. From the front end the send_to_backend function sends a LAPassThruFB message containing a user-defined string to a specified channel id. The send_to_backend API call packages up the user-defined string into a LAPassThruFB message and writes it to the output pipe of the Server Front End. This is a convenience function only. A programmer can write their own code to carry out this functionality.
From the back end the programmer may use a send_to_frontend call to build and send a LAPassThruBF message to the front end. The send_to_frontend API call includes the return channel id as an argument. The send_to_frontend packages up the data into a :APassThruBF message and sends it to the Dragon Back End which then routes it to the Launcher (through MRNet in the multi-node case) and through the Launcher to the Server Front End. This is a convenience function only. A programmer can write their own code to carry out this functionality.
The only messages passed from/to the Front End Server and to/from the Back End Server are the two PassThru messages and optionally a LASeverModeExit message to indicate that the backend server has exited.
Any output from the back end that is to be shared with the front end must be wrapped up in a LAPassThruBF message.
It is likely that the designer of the front and back end services will design their own message structure to be passed within the two PassThru messages. Any standard output or standard error output generated by the Back End Server will automatically be written to the console where the Launcher was invoked. If stdout or stderr is supposed to go to the Front End Server then it must be captured by the Back End Server and routed to the Front End Server in a LAPassThruBF message.
Likewise, two receive API calls are also available. The receive_from_backend and receive_from_frontend functions can be called to receive messages. The two receive API calls are implemented as awaitables in Python to support the AsyncIO framework.
The backend of the server can initiate shutdown of Server Mode by sending the LAServerModeExit message to the launcher. When the launcher receives this message it forwards it to the frontend of the server and also responds to the command processor, allowing the serve command to complete.
[TBD: How is API exposed/imported by the programmer. Exact packaging/use of API should be described here. If we were to decide to not expose infrastructure messages, then appropriate bindings of these API calls would need to be provided for C/C++ and Python (and others?). In Python the interface should support the AsyncIO framework.]
There are many possible uses for Server Mode. The next section provides details of using Server Mode for implementing a Jupyter Notebook Kernel. Another possible use is in providing a Python debugger interface to the Dragon Run-time Services. Finally, it would be possible to use this mode to provide HPC management services on a system. In each of these cases the dynamic nature of Python would allow the applications to be developed incrementally and tested incrementally, potentially saving a lot of costly development and testing time.
State Transitions

Fig. 55 State Diagram
The four states of the Launcher define four states the launcher could be in. In addition, there are a few more states during initialization that are not described here. The transitions shown in the state diagram document how the Launcher moves from one state to another. The state diagram does not show all commands possible in command mode. Specifically, commands that don’t cause a transition to a state are not shown in the state diagram.
The Initialization State takes care of bringing up the Dragon run-time services and then transitioning to the Command state. The Exit state takes care of bringing down the Dragon run-time services and terminating the launcher.
During initialization, if a program file, PROG, was provided on the command-line (not for server mode), then the following commands are issued in Command Mode once initialization is complete.
it = launch(exe="PROG")
join(it[0])
If PROG is not executable then the exe is python3 and PROG is passed as an argument to the launch command. During initialization, if Server Mode is specified, then the following commands are issued to the Command Mode once intialization is complete.
serve(frontendprog, backendprog, frontendargs, backendargs, ...)
And, if -r is specified, then the following command is issued to the command processor where PROG is the program given on the command-line.
run("PROG")
In this case, the PROG is a launch program and is run on the login node to control launching of programs within the Dragon environment.
If -i is NOT specified on the command-line and the program exits, then the following command is fed to the command processor when the program exits (i.e. after the join completes).
exit()
As a general rule, while initially in Command mode, commands will be issued automatically for the simple cases of running a single program or starting server mode. Command mode becomes visible to the user when the user uses the -i option from the command line.
Supporting Jupyter Notebooks
Server Mode was designed to support any distributed implementation of a server between a login node and the primary compute node. One use case of this functionality is in the implementation of a Jupyter Notebook kernel that runs within the Dragon run-time services.

Fig. 56 Dragon Server Mode for Jupyter Notebooks
There are two supported methods to run a Jupyter notebook in conjunction with the Dragon run-time services. The two methods have differing characteristics.
Fat Login Mode
Server Mode
Running the Jupyter notebook on a fat login node means that the notebook can be long running. In this case, the IPython Kernel runs on the fat login node. From within that IPython kernel a user can start a Dragon job by using the REPL command mode of the launcher to launch a Dragon program. A program is launched by using the Dragon launch command.
The benefit of fat login mode is that notebooks can be long-running. The disadvantage is that while computations can be launched on the compute nodes, the result is not available directly within the notebook. (Should we design a serializable result to be sent back from a process?). There is no additional support that is required of the Dragon run-time services required to run in this mode.
When running Dragon in Server mode, a Specialized Jupyter Kernel is run on the login node that interacts with the Kernel Back End running on the primary compute node to provide the notebook kernel functionality on the compute node. The disadvantage is that notebooks started in this mode only run as long as the allocation runs. The advantage is that the Jupyter notebook is run within the context of the Dragon run-time services and has full access to all of the compute nodes in the allocation. In addition, intermediate results are available to the notebook.
In Server Mode, the launcher starts two programs and distributes the responsibilities between these two programs. In the case of Jupyter notebooks the Specialized Jupyter Kernel provides the interface to the browser because it is from the login node that socket connections can be made to remote browsers. The Jupyter Kernel has several socket connections to maintain. The Kernel Back End provides the REPL environment where Python code is executed and provides the rest of the services of a Jupyter Python kernel.
The login node Specialized Jupyter Kernel must be written according to the documentation on making kernels in Jupyter. The Specialized Jupyter Kernel conforms to the requirements of a Jupyter kernel. The front end functions as a passthru to the Specialized Jupyter Kernel Back End and passes all incoming messages from the Jupyter front end browser to the Jupyter back end. The Jupyter messaging requirements are detailed in a document titled Messaging in Jupyter. A Jupyter kernel has 5 sockets that each serve a different purpose. Messages between the front end and the back end are defined for requests on these sockets and responses to the front end (as yet to be determined). The Launcher is not impacted by the design of the Jupyter support because all messaging between the Jupyter front end and back end occurs within LAPassThruFB and LAPassThruBF messages as defined in the Launcher Server Mode section.