Single Node Deployment
Single node mode runs everything on the host the initial dragon my.py command gets run on. In this respect
it is meant to operate exactly like the existing multiprocessing runtime, with the “spawn” launch method.
Below the steps of single node bringup and teardown are outlined. Note that once the user application
(my.py) is running, managed processes and applications can be started using Global Services. If the
user application decides to directly spawn processes itself, it retains the responsibilty for cleaning up any
resources they use.

Fig. 22 Deployment diagram a single node

Fig. 23 Single-Node Overview of Dragon Services
Note
In the single-node case, the Launcher serves as both frontend and backend component. It sends and receives several backend messages during bringup and teardown.
In the single-node case, as depicted in Fig. 22 + Fig. 23, there is no Transport Agent, MRNet tree, or Launcher backend service. Channels in Fig. 23 are represented by the colored arrows. The Launcher steps into the place of the Backend and the Shepherd communicates directly with the Launcher instead of going through the Backend and the MRNet tree. The Transport Agent is not started since there is no off-node communication in this case. However, Local Services and Global Services still are present to provide the same level of service that is present in the multi-node case. While the bringup and teardown of the Dragon Services is significantly different in the single-node and multi-node cases, from Fig. 22 and Fig. 23 the overall structure is similar.
Single Node Bringup

Fig. 24 Startup Sequence on a single node
The bringup of the Dragon run-time services is detailed in Fig. 24 and below, where also message descriptions are given.
During single node bringup the Shepherd is started by the Launcher and a pipe is used to provide the initial startup messages on the Shepherds stdin file descriptor. The message structure itself is identical to messages that are later passed on channels. However, since the Shepherd brings up Channels, they are not available when the Shepherd is started.
Initially the Shepherd process is started by the Launcher and run-time arguments are provided during the process launch. The Shepherd accesses the object named this as outlined in the section LaunchParameters. The channel Ids for both the Shepherd and Global Services are obtained from this dictionary object under the names GS_CUID and SHEP_CUID.
The Shepherd process immediately sends a SHIsUp message as detailed in the section on the Shepherd’s Other Messages to tell the launcher that it is up and running. It sends this message on its standard output file descriptor which the launcher receives through it’s pipe that was instantiated when the Shepherd process was created.
The Shepherd then allocates a shared segment for the Dragon run-time services using a memory pool object and then allocates a channel for itself with Channel Id 3. The Shepherd also allocates a channel for Global Services with Channel Id 2.
Once the two channels are created the SHChannelsUp message is sent to the launcher. At this point the Shepherd expects the first message on it’s channel to be the GSPingSH message. Once that is received the Shepherd responds with a SHPingGS message sent to the Global Services channel and it runs its AsyncIO loop with a recv task ready to receive any other messages off its main queue. And that concludes the single-node startup.
Discuss the startup function and how we enter into the main loop.
This section describes what has to happen between the different actors to bring up a runtime in a single node case.
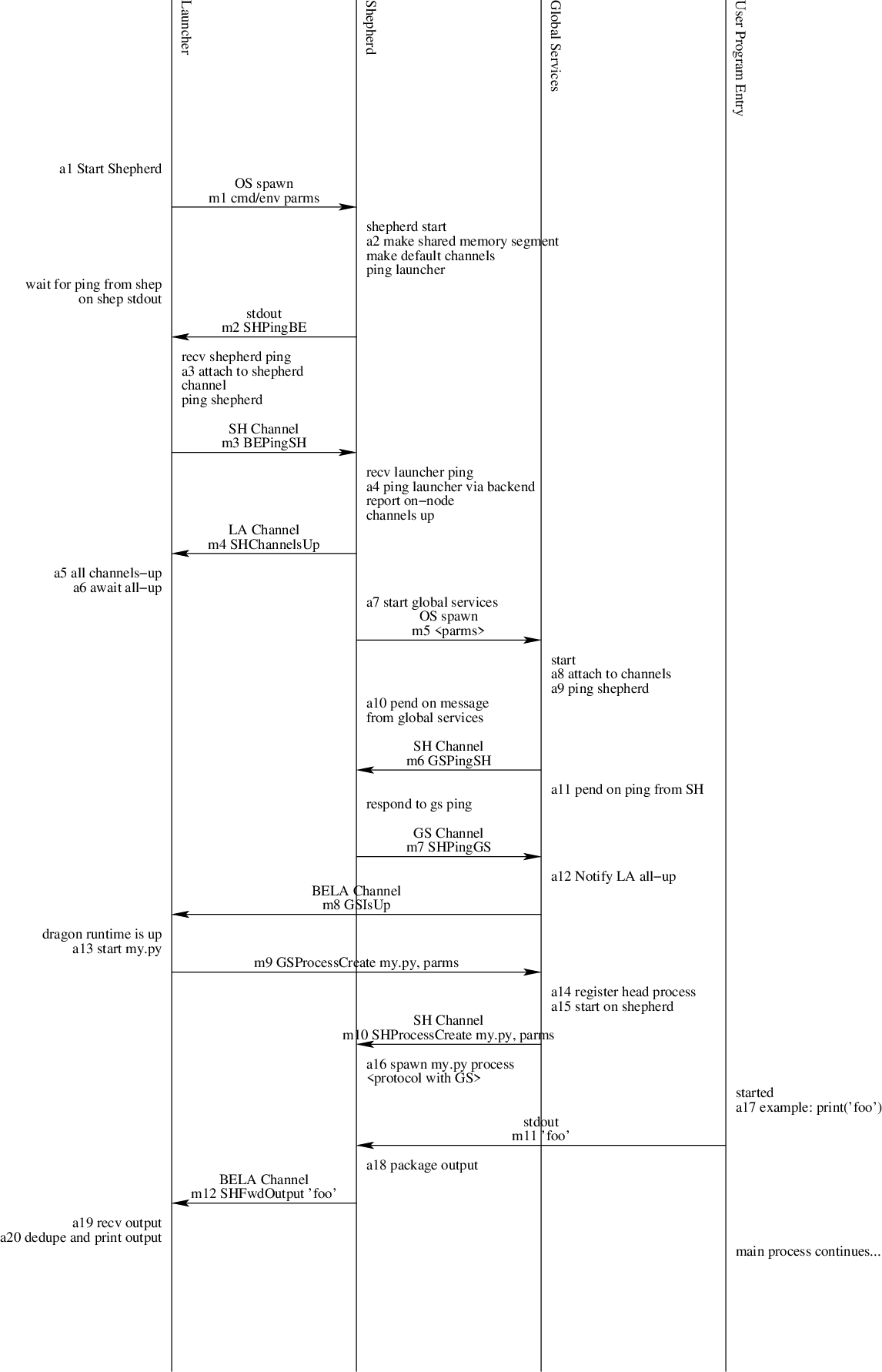
Transaction diagram
This transaction diagram indicates the activities (denoted by a and a serial number) and messages (denoted by m and a serial number). Some activities between different actors can happen in parallel, or in arbitrary order such as (example). However, any inbound message to an entity must be received before any subsequent activities can take place.